")
Modele szybowców latające w górach na przełomie lat
Modele swobodnie latające w górach posiadają długoletnią tradycję. Są wypuszczane z ręki pod wiatr, który opływając zbocze tworzy prąd wznoszący umożliwiający wykonanie długotrwałego lotu. Już latach pięćdziesiątych ubiegłego wieku rozgrywane były ogólnopolskie zawody modeli zboczowych w Ustjanowej. Konstrukcje płatowców charakteryzowały się dużym wzniosem skrzydeł dla zachowania jak największej stateczności i zdolności utrzymywania lotu po linii prostej – pod wiatr, co zapewniało dłuższy czas lotu. Niestety silne podmuchy i turbulencje powodowały wytrącenie modelu z optymalnego toru lotu i często bliskie spotkanie z ziemią, gdy model został zdmuchnięty i z bocznym lub tylnym wiatrem uderzał w zbocze.
Na zdjęciu powyżej: VII Zawody Modeli Szybowców Zboczowych w Ustjanowej – kwiecień 1960 (fot. modelarze-krosno.xq.pl/skan fotografii: Zbiory Krośnieńskiego Klubu Seniorów Lotnictwa przy APdkp SL w Krośnie)
W latach późniejszych modelarze zaczęli zastanawiać się jak usprawnić swoje konstrukcje, zaczęto stosować różnego rodzaju sterowania mechaniczne, które miały pomóc w locie po założonym torze. Prawdopodobnie pierwsze tego rodzaju sterowanie zaprezentował Niemiec Hans Gremmer w 1951 roku. Prekursorem rozwiązań opartych o sterowanie mechaniczne był w Polsce znany i zasłużony modelarz Wiesław Jakubowski z Zakopanego.
Z biegiem czasu wykształciła się klasa F1E – modeli szybowców sterowanych automatycznie, potocznie nazywana „prętami magnetycznymi”, jej początki datowane są na rok 1977. I Mistrzostwa Świata w tej kategorii zostały rozegrane w Polsce w Nowym Targu w roku 1989. Wcześniej były rozgrywane tylko Mistrzostwa Polski i towarzyskie Zawody Międzynarodowe, obecnie zawody najwyższej rangi to wcześniej wspomniane Mistrzostwa Świata oraz seria zawodów Pucharu Świata.
Konkurencja modeli szybowców sterowanych automatycznie F1E polega na wypuszczeniu modelu szybowca pod wiatr ze zbocza i wykonaniu lotu o zadanej długości. Sztuką jest dobranie i ustawienie odpowiedniego azymutu lotu oraz wypuszczenie modelu w sprzyjających warunkach. Zawodnik podczas rywalizacji wykonuje pięć lotów, z czego w każdym z nich jego model musi wylatać określony czas – najczęściej jest to 3 minuty (zależnie od warunków atmosferycznych). Jeśli zdarzy się sytuacja, że kilku zawodników uzyska „komplet” lotów maksymalnych następują dogrywki – dodatkowe loty, w których czas lotu jest wydłużany, a miejsce startu przenoszone w dół zbocza.

Model szybowca sterowanego automatycznie - F1E (fot. World Air Sports Federation)
Początkowo konstrukcje modeli były praktycznie w całości drewniane (sosna, balsa), obecnie większość materiałów stanowią włókna węglowe. Czyni to modele wytrzymałymi, a przy tym zapewnia dość niską masę. Rozpiętość modeli sięga nawet 2.5m, powierzchnia nośna jest jednak ograniczona do 150 dm2 przy zachowaniu jej obciążenia nie przekraczającego 100g/dm2. Jest to klasa modeli swobodnie latających – zawodnik po wypuszczeniu modelu nie ma już z nim kontaktu. System sterowania musi być całkowicie autonomiczny, nie jest dopuszczalna żadna zdalna kontrola nad modelem (wykluczając ograniczenie długości lotu – zdalny determalizator). Do startów tego typu modelami nie są potrzebne wysokie góry, wystarczą małe pagórki, ważne żeby nie były porośnięte drzewami.
Zasada działania sterowania mechanicznego
Układy sterowania modelami szybowców F1E opierają się na magnesie, osadzonym w piaście, która umożliwia jego swobodne obracanie się. Podobnie jak w kompasie jest tu wykorzystywane zjawisko ustawiania się swobodnie zawieszonego magnesu wzdłuż linii pola magnetycznego Ziemi. Kompas składa się z wąskiego, długiego i lekkiego magnesu (tzw. igły magnetycznej) ułożyskowanego na pionowej osi. Sterowanie modelu F1E jest zbudowane na tej samej zasadzie. Magnes dodatkowo sprzężony jest ze sterem kierunku statecznika pionowego. Zawodnik ustala kierunek lotu na dany azymut – lotka steru kierunku może być ustawiona w dowolnej pozycji względem magnesu przed startem. Podczas lotu obraca się ona razem z magnesem, gdy tor lotu zostanie zaburzony przez turbulencje czy podmuch wiatru następuje jego skorygowanie – magnes wychyli ster kierunku (rysunek poniżej).
„Siła” jaką dysponuje magnes, to około 30gr, więc zaprojektowanie i wykonanie steru musi być staranne. Magnes musi poruszać się lekko, ale z drugiej strony należy też wyeliminować efekt chybotania się magnesu więc potrzebne jest delikatne tarcie.
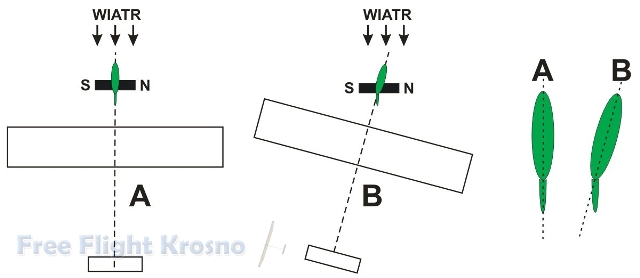
Problemy pojawiają się jednak, gdy skrzydła modelu nie są poziomo, ponieważ przy przechyleniach magnes nie ustawia się już równolegle z liniami pola magnetycznego. Duży współczynnik stateczności modeli ma zapobiegać takim przechyleniom i je niwelować, jednak często zdarza się, że natura jest silniejsza.
Z przodu kadłuba umiejscowiona jest gondola (zdjęcie poniżej) mieszcząca magnetyczny system sterowania, który ma za zadanie utrzymywać model na zadanym torze lotu pod wiatr, w kierunku danego azymutu magnetycznego. Sterowanie magnetyczne posiada wady: jest podatne na uszkodzenia i wrażliwe na pył, do precyzyjnej pracy koniecznym jest idealne wyważenie magnesu i dokładna regulacja.

Gondola z łożyskiem gdzie umieszczony jest magnes, z którym sprzężony jest ster kierunku (fot. CIAM Flyer, 5/2015)
Zależnie od prędkości wiatru potrzebna jest odpowiednia prędkość modelu, tak aby powoli posuwał się do przodu, jest to uzyskiwane dzięki dodawanemu obciążeniu – balastowi, z którym model uzyskuje większą prędkość lotu. Oprócz tego ważny jest dobór odpowiedniego modelu na dane warunki, różniącego się np. profilem skrzydła.
Statecznik poziomy stanowi około 15% powierzchni skrzydła, podobnie jak w klasie F1A – dzięki czemu z powodzeniem można zaadoptować skrzydła od takiego modelu. Ważnym jest jednak, aby skrzydła nie miały zwichrzeń, ponieważ model ma lecieć po linii prostej. Belka kadłubowa jest tutaj jednak dłuższa niż w modelach F1A, podnosi to stateczność wzdłużną. Środek ciężkości jest przesunięty do tyłu na tyle, na ile jest to w zasadzie możliwe i oscyluje w przedziale 55-60% cięciwy aerodynamicznej skrzydła. Dzięki temu uzyskiwany jest odpowiedniej długości ramie na końcu którego umieszczona jest gondola z magnesem – tak aby ster kierunku był w stanie zmienić tor lotu modelu. Z drugiej strony mamy dość długie ramię, na końcu którego są stateczniki; im mniejsza waga stateczników tym mniejsza siła bezwładności więc model szybciej wróci na zadany azymut lotu.
Flop system i determalizator
W trakcie startu krawędź spływu statecznika poziomego opuszczona jest kilka milimetrów w dół (fotografia poniżej – po lewej). Model wyrzucany jest pod kątem około 45° z dużą siłą i lecąc łukiem po upływie ok. 1.5-2s ułożony jest poziomo w naturalnej pozycji do lotu szybowego. Statecznik poziomy przyjmuje wtedy położenie właściwe dla lotu ślizgowego (fotografia poniżej – środkowa). Ten rodzaj startu niesie ze sobą spore ryzyko, ponieważ wymaga idealnego zgrania siły i kąta wyrzutu z czasem trwania tej fazy lotu. Z tego powodu nie jest stosowany przez wszystkich zawodników, część z nich model wypuszcza przed siebie równolegle do powierzchni ziemi.
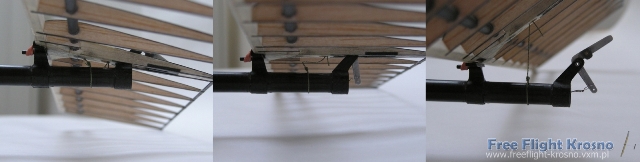
Położenie statecznika poziomego w poszczególnych fazach lotu modelu (lot wznoszący - wychylenie przesadzone, w rzeczywistości do kilku mm, lot szybowy, determalizator).
Po upływie zadanego czasu lotu następuje zmiana położenia statecznika poziomego do pozycji tzw. „determalizatora”. (fotografia powyżej – po prawej). Spływ statecznika jest wtedy podniesiony do góry pod kątem 35-45° względem pozycji neutralnej. Szybowiec w tym momencie zmienia trajektorie swojego lotu, ruch postępowy do przodu jest minimalny, a model opada jak liść na ziemię. Pozwala to zakończyć lot modelu i zapobiega jego zgubieniu.
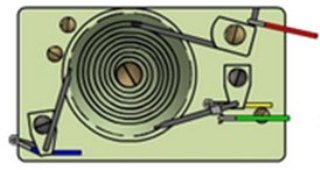
Przykład mechanicznego wyłącznika czasowego.
Sekwencją zmiany kąta natarcia statecznika steruje wyłącznik czasowy. Jest to mechanizm posiadający sprężynę, która po jej nakręceniu napędza system kół zębatych powodujących powolny ruch obrotowy „ślimaka”. Dźwignie ustawiane są odpowiednią ilość zwoi od brzegu tarczy i spadają z niej po kolei, gdy dana z nich pojawia się na końcu ostatniego zwoju. Powyżej wyłącznik trzy-funkcyjny, mechaniczny.
Źródła:
Giezendanner E. Ch.: F1E – Fly an FAI Championship Class, CIAM Flyer, 5/2015
Chaussebourg P.: F1E World Championships – Liptovsky Mikulas, CIAM Flyer 10/2000
Faulkner T.: Magnet flying – some hows and whys, Gladys International, January 2014
“Medale zdjęte z gór”, S. Kubit (http://freeflight-krosno.vxm.pl/?p=3401)
FAI Sporting Code, Section 4 – Aeromodeling, Volume F1 – Free Flight Model Aircraft
Więcej informacji na stronie www.freeflight-krosno.vxm.pl
")
")
")
")
")
")
")

")




Komentarze