.")
Miękkopłaty Jerzego Wolfa - część II
W tym roku, w dniu 26 lipca mija dziesiąta rocznica odejścia Jerzego Wolfa – inżyniera i konstruktora lotniczego, autora licznych rozwiązań patentowych, pilota lotni i motolotni, twórcy pionierskich i innowacyjnych rozwiązań w dziedzinie miękkopłatów.
Starsi i bardziej dociekliwi entuzjaści swobodnego latania z pewnością pamiętają to nazwisko – Jerzy Wolf dla wielu kojarzy się z lotnią Z-80 „Zeta” i koncepcją motolotni sterowanej drążkiem zwaną ZEM. Te konstrukcje są jednak jedynie dwoma dziełami z jego niezwykle bogatego dorobku konstruktorskiego obejmującego studia, badania i realizacje wielu różnych miękkopłatów, które powstały w okresie 34 lat pracy pomiędzy rokiem 1970 i 2004.
1973 – 1974 – próby żagli poziomych z zastosowaniem koncepcji skrzydła o powłoce sprężystej napiętej obwodowo.
Od początku historii żeglarstwa było oczywistym, że żagiel powinien być ustawiony pionowo. Było też zrozumiałe, że siły nań działające starają się przechylić łódź. Siłom przechylającym przeciwdziała stateczność kadłuba – jego szerokość i ciężki balast na kilu.
Brytyjski pionier lotnictwa Percy Pilcher, który pracował w końcu XIX wieku, zauważył jednak, że można w ogóle uniknąć momentów przechylających ustawiając żagiel nie pionowo, lecz ukośnie. Siły aerodynamiczne zamiast przechylać jacht, próbowałyby wówczas wynurzyć go z wody. Przy odpowiednio dobranej geometrii pędnika możliwe byłoby idealne zrównoważenie momentów sił i jedynym ograniczeniem powierzchni żagla byłoby takie jego przewymiarowanie, że łódź całkowicie wynurzyłaby się z wody. Oczywiście kosztem tego rozwiązania jest mniejsza sprawność, bowiem składowa pozioma siły napędu żaglowego jest przy ukośnie ustawionym żaglu zdecydowanie mniejsza niż przy klasycznym - pionowym. Jednak wizja lekkiego kadłuba, uniesionego przez pochylone skrzydło i ledwie dotykającego fal, była bardzo kusząca dla Pilchera i jego następców.
Jednym z nich był Jerzy Wolf, pracownik Instytutu Lotnictwa, który stworzył pionierską w owym czasie koncepcję sprężystego skrzydła i postanowił wypróbować ją jako napęd do łodzi żaglowej. Wykorzystał w tym celu kadłub od łodzi klasy Cadet ze skróconym masztem, na którego topie przymocowane było skrzydło. Próby z różnymi rodzajami skrzydeł wykonano na początku lat 70-tych na Zalewie Zegrzyńskim. Niewiele wiadomo o przebiegu tych prób. Wzmiankę o poziomym żaglu Wolfa można znaleźć z czasopiśmie Żagle nr 12/1973 i 8/1974 oraz w książce Andrzeja Moldenhawera „Okręty na skrzydłach”.

Łódka napędzana żaglem Jerzego Wolfa podczas prób na Zalewie Zegrzyńskim w 1973 r. (Źródło: Żagle nr 12/1973).
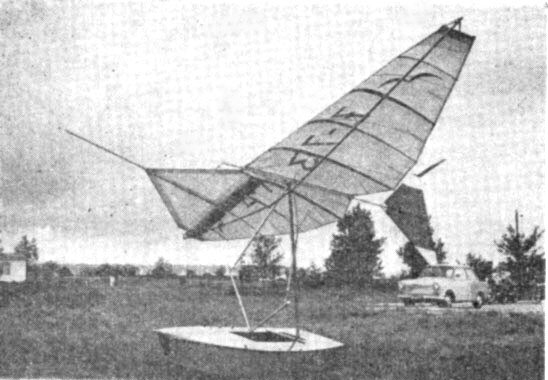
Łódka napędzana żaglem Jerzego Wolfa podczas prób na Zalewie Zegrzyńskim w 1973 r. (Źródło: Żagle nr 8/1974).
Idea napędu oscylacyjnego.
W 1974 roku odbyła się rezentacja koncepcji napędu oscylacyjnego dla szybowców ultralekkich na Drugim Międzynarodowym Sympozjum Naukowym dotyczącym problematyki zasad lotu niskich prędkości i lotów bezsilnikowych zorganizowanym przez American Insitute of Aeronautics and Astronautics (AAIA), Massachusetts Institute of Technology (MIT), Sparing Society of America (SSA) w dniach 11-13 września 1974 roku w Cambridge, USA.
.jpg)
(źródło: Jerzy Wolf, Technological prospects for oscillating – wing propulsion of ultralight gliders, 1974r.).
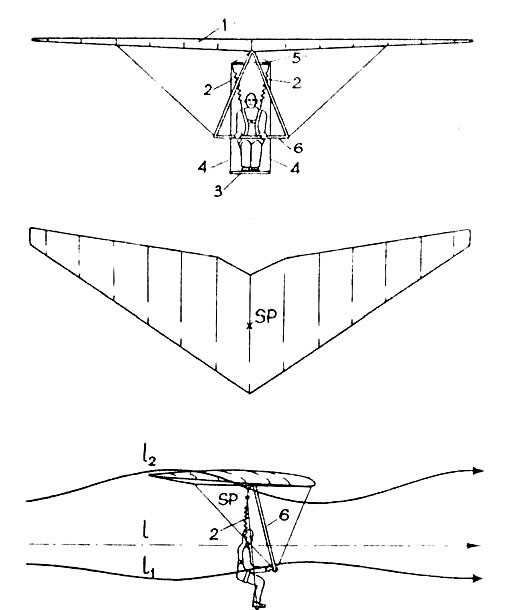
(źródło: Jerzy Wolf, Technological prospects for oscillating – wing propulsion of ultralight gliders, 1974r.).
Praca dotyczy teoretycznej analizy możliwości dokonania lotu z wykorzystaniem drgań rezonansowych układu pilot – lotnia wywołanych z użyciem ludzkich mięśni. Odmiennie niż większość konstruktorów aparatów latających z napędem mięśniowym, którzy energię wytworzoną przez człowieka przenosili na śmigło dla wywołania ruchu i wytworzenia siły nośnej na płacie, Jerzy Wolf podjął próbę teoretycznego rozwiązania problemu w całkiem odmienny sposób. Według jego koncepcji mięśnie miały służyć do wywołania oscylacji w płaszczyźnie pionowej na przykład przez mechanizm sprężynowy podwieszenia pilota i według idei Wolfa podtrzymanie lotu miało być możliwe przez skoordynowanie wzmiankowanych oscylacji ze zmianami kąta natarcia płata nośnego.
Napęd skrzydłowy z wykorzystaniem drgań rezonansowych układu pilot – lotnia i napędu mięśniowego był także badany z pozytywnymi wynikami prób przez T.C. Jonesa w USA w latach siedemdziesiątych XX wieku.
Lotnie wyczynowe - innowacje i poszukiwania w celu poprawy osiągów i własności użytkowych lotni.
Lotnia Z-80 – koncepcja, realizacja, próby w locie, produkcja seryjna.
Po zakończeniu prób i badań prowadzonych nad miękkopłatami Z-75, Z-77, Z-78 zbudowanymi według autorskiej koncepcji w latach 1975 – 1979, Jerzy Wolf około 1980 roku opracował lotnię wyczynową Z-80. Była to konstrukcja nowoczesna, zbudowana zgodnie z ówczesnymi trendami światowymi – posiadała znaczny procent podwójnego pokrycia, wyposażona była we wkładki profilujące krawędź natarcia, zwane popularnie kesonami, miała kieszeń kilową z płetwą podskrzydłową oraz długi kil z przedłużonym pokryciem krawędzi spływu w centropłacie. W tamtym czasie Z-80 była konstrukcją wyjątkową. Jej wyjątkowość w porównaniu do innych konstrukcji polegała nie tylko na tym, że lotnia Z-80 cechowała się awangardowymi rozwiązaniami, ale w przeciwieństwie do większości konstrukcji z tamtego okresu, lotnia Z-80 powstała w wyniku kompletnego procesu projektowo – badawczego w Instytucie Lotnictwa, na który składały się oprócz części obliczeniowej i dokumentacji wykonawczo – warsztatowej także badania tunelowe i pomiarowe dotyczące sił i momentów. W dziedzinie lotniarstwa było to w owym czasie unikalne także w światowej skali i w podobny sposób powstawały nieliczne lotnie jedynie najbardziej renomowanych producentów.
Lotnia Z-80 (fot.: Bernard Koszewski, źródło: Skrzydlata Polska).
.jpg)
Lotnia Z-80 w trzech rzutach (źródło: Skrzydlata Polska).
Dane techniczne lotni Z-80:
Lotnia z kieszenią kilową.
Powierzchnia nośna: 16 m²
Rozpiętość: 10,2 m
Kąt dziobowy: 150 stopni
60 % podwójnego pokrycia
Waga: 25 kg
Długość lotni w stanie złożonym: 3 m
Waga podwieszenia: 60-80 kg
Vmax: 80 km/h
Vmin: 22 km/h
.jpg)
Lotnia Z-80 na Kasprowym Wierchu podczas obozu lotniarskiego w Zakopanem w kwietniu1985 roku. Do startu z pomocą Krzysztofa Kosiora przygotowuje się Andrzej Wieniawa Leszczyński, (foto Archiwum Gorpol, źródło: Gorpol).
Trzeba jednocześnie podkreślić, że konstrukcja ta do dziś budzi duże kontrowersje. Znane są zróżnicowane opinie pilotów – jedne jednoznacznie krytyczne i dyskwalifikujące, inne entuzjastyczne i pozytywne.
– „Kiedy [lotnia Z-80 – przyp. autora] pojawiła się na Żarze wzbudziła w nas zachwyt. Poprawnie i czysto wykonana. Wyglądała na rasową lotnię, była dzieckiem naukowca z Instytutu Lotnictwa w Warszawie dr Wolfa, który dobrze znał meandry lotniarstwa. Niestety w praktyce okazała się zupełnym niewypałem, chociaż była dmuchana w tunelu w instytucie. Była trudna w pilotażu i co ważniejsze była lotnią nieprzewidywalną. Pierwszym pilotem oblatywaczem jej, był Józek Korol, który opowiadał, że o mało Z-ta nie doprowadziła go do zawału serca. Podczas zamierzonego wprowadzenia jej w korkociąg przez 250m w pionie nie chciała z niego wyjść. Innym razem podczas podchodzenia do lądowania (…) waliła się na skrzydło (…). Józek doświadczony pilot szybko zrozumiał że na tym skrzydle to można się tylko zabić i więcej już jej nie dotykał. Zeta, na Żarze miała złą opinie - myśmy się ją bali i nikt na niej nie latał. Oczywiście Wolf ją poprawiał, ale jednak o ile pamiętam nikt się nie kwapił. Dopiero (…) kol.Parszewski (…) podjął się próby nauczenia Zety latać. Z tego co pamiętam, latał na niej rzadko przez kilka sezonów. Ale czy ją nauczył latać trudno mi jest dzisiaj powiedzieć. Zeta niczym konkretnie się nie wykazała, została zapomniana. Moim skromnym zdaniem była to konstrukcja nieudana. Tym bardziej, że wchodziły nowe konstrukcje (…). Pulsar.”(źródło: forum lotnie.pl)
– „Co do lotni Z-80 (a były to lata 80-te) mam odmienne zdanie czy była ona bezpieczna. Na moich oczach spadł pilot na Żarze w niekontrolowanym locie spiralnym uszkadzając trwale kręgosłup, a inny zginął w prostym locie w Jeżowie Sudeckim. Józef Korol, który był jej pilotem testowym, pewnego dnia po locie nurkowym z którego wyszedł cało tylko dlatego, że był doświadczonym pilotem powiedział, że więcej na niej nie wystartuje. Była szybka (na tamte lata) to fakt, ale szybko i niekontrolowanie traciła prędkość zwalając się na skrzydło. Z tego co pamiętam nikt nie chciał na niej latać. Zgodził się dopiero Don Alan. Dasiu.” (źródło: forum lotnie.pl)
– „Powiedziałbym raczej – była dość wymagająca. Jednak latała świetnie. Można było wyjść z nurkowania (bo miała dość sztywny keson), co ówczesnym lotniom jednopowłokowym przychodziło z trudem. Trzeba było pilnować prędkości (16m2), bo po przeciągnięciu potrzebowała trochę wysokości. "Spirala na Żarze" to wynik przeciągnięcia na 15m. Miałem jej sporo do zawdzięczenia np. ucieczka spod chmury nad Lipową (Skrzyczne). Nie dam sobie uciąć ręki, ale chyba Józek, po owym nurkowaniu i przeregulowaniu dalej latał jakiś czas na Zetce, a w MP w 1982r. na Żarze startowało na niej 3 pilotów. SB.” (źródło: forum lotnie.pl)
Lotnia Z-80 wyróżniała się również tym, że jako pierwsza konstrukcja krajowa w historii była wyprodukowana seryjnie (60 sztuk) profesjonalnymi metodami przemysłowymi w Wytwórni Sprzętu Komunikacyjnego PZL na Okęciu w Warszawie i była dostępna w wolnej sprzedaży. Jednak w ówczesnym systemie polityczno – gospodarczym proces przygotowania i produkcji trwał długie lata, co przy dynamicznym postępie w rozwoju techniki lotniowej spowodowało, że kiedy seria lotni Z-80 została wreszcie wyprodukowana i gotowe egzemplarze trafiły do sprzedaży około roku 1984 była to już konstrukcja przestarzała.
.jpg)
Lotnia Z-80 podczas prób na stanowisku pomiarowym (fot. W. Garbarczyk, źródło: Skrzydlata Polska).
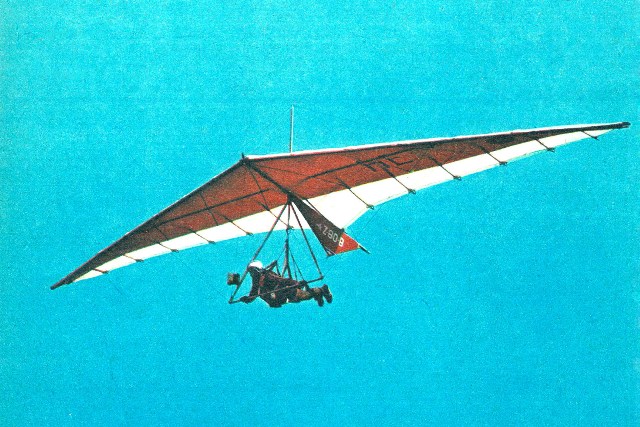
Istniał wariant lotni Z-80, który został przystosowany do lotów silnikowych. Co najmniej jeden egzemplarz motolotni skonstruowanej przez Zbigniewa Czerwika, Lecha Pitonia i Piotra Pastusiaka ze skrzydłem Z-80B był przez szereg lat z powodzeniem i bezpiecznie użytkowany w Aeroklubie Łódzkim.
„Pewną ciekawostką jest, że (…) [Zbigniewowi Czerwikowi – przyp. autora] udało się zaliczyć wszystkie kolejne jedenaście edycji Motolotniowych Mistrzostw Polski od roku 1990 do 2000 włącznie, startując na tej samej motolotni z silnikiem Trabant 601 i skrzydłem Zeta Z-80-B („Zeta”) zaprojektowanym przez doc. dr inż. Jerzego Wolfa, podczas gdy koledzy w tym czasie kilkukrotnie zmieniali sprzęt przesiadając się na motolotnie nowszej generacji”
(źródło: Zbigniew Czerwik, „Historia motolotniarstwa w Aeroklubie Łódzkim”).
Egzemplarz tej motolotni zachował się do dzisiaj.

Motolotnia ze skrzydłem Z-80 (źródło: Zbigniew Czerwik, „Historia motolotniarstwa w Aeroklubie Łódzkim”).

Motolotnia ze skrzydłem Z-80 (źródło: Zbigniew Czerwik, „Historia motolotniarstwa w Aeroklubie Łódzkim”).
.jpg)
Motolotnia ze skrzydłem Z-80 (źródło: Skrzydlata Polska).
Projekt końcówki skrzydła lotniowego poprawiającej sterowność.
Autorzy wynalazku: Jerzy Wolf, Tadeusz Idziak, Wojciech Narożniak, ok. 1984 roku.
„Wynalazek rozwiązuje problem poprawy sterowności lotni miękkopłatowej. Zakończenie skrzydła lotni, w którym powłoka obejmująca rurę krawędzi natarcia skrzydła napięta jest szeregiem listewek nadających mu żądany kształt, bądź przymocowana jest do wychylnego względem krawędzi natarcia ścinu, charakteryzuje się tym, że powłoka (1) mocowana jest obrotowo w punkcie (B) przy końcu rury (3) krawędzi natarcia, od jej strony przeciwnej przodowi lotni. Konstrukcję napinającą powłokę, na końcu skrzydła, stanowi kratownica utworzona przez ścin (5’), połączony ze wzmocnieniami (2, 3, 4) obrzeża powłoki (1) i łącznikami (7, 8), z których jeden mocuje powłokę (1) obrotowo do rury (6) krawędzi natarcia. Powierzchnia zewnętrzna rury (6) krawędzi natarcia ma wykończenie zmniejszające współczynnik tarcia.”
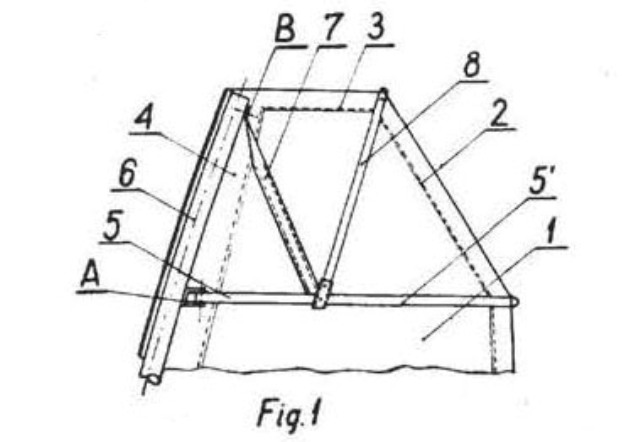
(źródło: Biuletyn Urzędu Patentowego nr 20 (308), Warszawa 1985).
System sterowania lotni pionową płetwą „IL-Fin”, ok. 1984 – 1988 roku.
(wynalazek chroniony zgłoszeniami patentowymi P.265.264 i P.265.666)
System sterowania dla lotni i motolotni charakteryzował się zastosowaniem pionowej powierzchni sterującej w postaci płetwy nadskrzydłowej w postaci pionowego słupka lotni oraz załamanego przegubowo kila, który umożliwia odwrócenie kierunku wychylenia płetwy i ułatwia jednocześnie poprzeczne przemieszczanie środka masy układu.
W pierwszym etapie wykonano badania stoiskowe kinetyki szkieletu lotni i przestrzennego mechanizmu zmiany wyważenia oraz wychylania płetwy.
W drugim etapie zrealizowano badania w locie, przy czym stopniowo powiększano powierzchnię płetwy. Badania potwierdziły rosnącą skuteczność ich działania i wykazały, że funkcje płetwy można interpretować jako funkcję pionowej lotki centralnej oraz zarazem bezpośrednio oddziałującej powierzchni sterowej, korzystnie zacieśniającej i przyspieszającej zakręt w początkowej fazie manewru.
.jpg)
Pięć płetw systemu IL-Fin badanych w locie (źródło: Skrzydlata Polska).
.jpg)
Mechanizm systemu IL-Fin (źródło: Skrzydlata Polska).
.jpg)
Schemat graficzny początkowych skutków sterowania z użyciem systemu IL-Fin
(źródło: Skrzydlata Polska).
Lotnie wysokowyczynowe Z-84 i Z-87;
Ponieważ okazało się, że wychylna płetwa podskrzydłowa w postaci kieszeni kilowej nie spełnia dobrze funkcji aerodynamicznej, konstruktor pomyślał o zmianie kierunku jej wychyleń. Ewolucja prototypów lotni Z-84 i Z-87, skonstruowanych w Instytucie Lotnictwa w Warszawie, polegała najpierw na zastosowaniu przegubowego kila o zawiasie w pobliżu węzła centralnego szkieletu. Kil taki umożliwił zwiększenie przemieszczeń poprzecznych punktu podwieszenia pilota, a jednocześnie zmniejszyło się tarcie kila o powłokę. Następnie na tylnej, odwrotnie wychylającej się części kila, mocowano różnego kształtu i wielkości płetwy nadskrzydłowe, stanowiące jednocześnie oprofilowanie pionowego masztu szkieletu lotni i wychylające się przeciwnie do wychylenia kieszeni kilowej. Próby w locie potwierdziły przewidywania teoretyczne sterowania płetwowego IL-Fin: osiągnięto zmniejszenie sił na sterownicy i znaczną poprawę własności pilotażowych. Pozwoliło to powiększyć napięcie powłoki oraz sztywność i doskonałość skrzydła dzięki ograniczeniu jego skręcenia i przy zachowaniu dużej rozpiętości. Skrzydło Z-87 przewidziano również do zastosowań motolotniowych i przeprowadzono próby w locie w takiej konfiguracji.
Dane techniczne lotni Z-84:
Lotnia bezkieszeniowa z przegubowym kilem i systemem sterowania płetwowego IL-Fin.
Sposób powiększania napięcia powłoki objęty zgłoszeniem patentowym.
Rozpiętość: 11,4 m
Powierzchnia nośna: 17,0 m²
Dane techniczne lotni Z-87:
Lotnia bezkieszeniowa z przegubowym kilem i systemem sterowania płetwowego IL-Fin.
Sposób powiększania napięcia powłoki objęty zgłoszeniem patentowym.
Rozpiętość: 11,6 m
100 % podwójnego pokrycia i w pełni zamknięte profile na całej rozpiętości (wg opisu konstruktora – przyp. autora).
Na lotni Z-87 startował Michał Parszewski podczas I Lotniowych Mistrzostw Państw Socjalistycznych, zorganizowanych na górze Żar w dnaich7-17 lipca 1987r.
W klasyfikacji końcowej zajął 14 miejsce na 24 zawodników. (źródło: Skrzydlata Polska)
.jpg)
Lotnia Z-87 po starcie z Żaru (źródło: Horyzonty Techniki 1988).

Lotnia Z-87 (źródło: Horyzonty Techniki 1988).
Motolotnia ze skrzydłem Z-87 w trakcie prób (źródło: Horyzonty Techniki 1988).
Wychyłopłat bezogonowy z zamkniętą kabiną.
1992 – 2004 Koncepcja, realizacja i próby w locie aparatów ZEM 92, ZEM 93, ZEM 94.
Niezwykle kusząca jest wizja połączenia komfortu zamkniętej kabiny samolotu z zaletami motolotni: jej unikalnej manewrowości, prostoty konstrukcji i obsługi, łatwości transportu i przechowywania, przy niewiele gorszych w porównaniu do samolotu parametrach eksploatacyjnych.
Jerzy Wolf marzył o zbudowaniu szybkiej motolotni z zamkniętą kabiną i samolotowym drążkiem sterowym, „(…) maszyny użytkowej o wysokiej manewrowości, zdolnej do latania wzdłuż skomplikowanej rzeźby terenu w warunkach silnej turbulencji przyziemnej, wzbudzanej silnym wiatrem” – jak sam pisał.
Wydaje się, że inspiracją dla konstruktora była tu włoska motolotnia z instalacją do lotów agro zbudowana w połowie lat osiemdziesiątych, w której zastosowano mechanizm przeniesienia sterowania z trójkątnej sterownicy na drążek samolotowy.

Włoska motolotnia z instalacją do lotów agro sterowana drążkiem (źródło: Horyzonty Techniki 1988).

I jej mechanizm sterowania (źródło: Horyzonty Techniki 1988).
Prace nad motolotnią ZEM – 92 podjęto w 1990 r. W 1992 r. oblatano dwumiejscową motolotnię ZEM-92. Jednocześnie trwały prace nad jej ulepszoną wersją ZEM-93, której próby rozpoczęto latem 1993 r. Podczas badań wpływu zmian położenia punktu zawieszenia skrzydła na właściwości lotne egzemplarz motolotni ZEM-93 uległ uszkodzeniu. Maszyna została odbudowana w latach 1994-95 z dodanym statecznikiem pionowym na tylnej części kadłuba. W 1996 r. program był kontynuowany.
Dalszym rozwojem konstrukcji były motolotnie ZEM-94 "Mozeta" i ZEM-3.
W typowym wychyłopłacie, jakim jest motolotnia, sterowanie odbywa się poprzez zmianę położenia względnego środka masy i zmianę wektora siły nośnej. Zakres wychyleń sterownicy oraz odczuwane przez pilota siły, niezbędne zwłaszcza do sterowania kierunkowo – poprzecznego są znacznie większe niż w przypadku sterowania aerodynamicznego z użyciem powierzchni sterowych. Ponadto ergonomiczny zakres wychyleń drążka sterowego jest ograniczony od kilku do kilkunastu centymetrów, a wymagany zakres ruchów sterownicy od kilkunastu do kilkudziesięciu centymetrów. Jest to jeden z głównych problemów stojących przed projektantem, który drążkiem chce zastąpić trójkątną sterownicę.
Według opinii uzyskanych od znajomych konstruktora problem ten został rozwiązany z użyciem mechanicznego systemu dźwigni z przekładniami. O tym, że wychyłopłat ZEM był zdolny do bezpiecznych lotów nie tylko w spokojnej atmosferze, ale także w warunkach silnej turbulencji powietrza, świadczą relacje uczestników kursu dla kandydatów na instruktorów motolotniowych, jaki odbywał się w połowie lat dziewięćdziesiątych w Toruniu. Pomimo niesprzyjającej, deszczowej pogody z porywistym, silnym wiatrem Jerzy Wolf, jako jeden z tylko dwóch uczestników spotkania, przyleciał swoją motolotnią sterowaną drążkiem pokonując dystans około 150km z Modlina do Torunia.

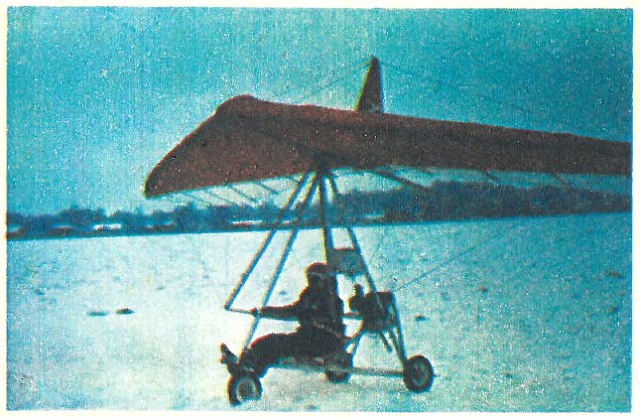
Motolotnia ZEM (foto Jerzy Wolf via Konrad Zienkiewicz, źródło: samolotypolskie.pl).

Motolotnia ZEM (fot. Ze zbiorów rodziny Wolf, źródło: Przegląd Lotniczy PLAR 10/2004).

Motolotnia ZEM (fot. Ze zbiorów rodziny Wolf, źródło: Przegląd Lotniczy PLAR 10/2004).

Motolotnia ZEM – kadłub w budowie widziany od tyłu
(fot. via Henryk Doruch, źródło: forum homebuildairplanes.com).
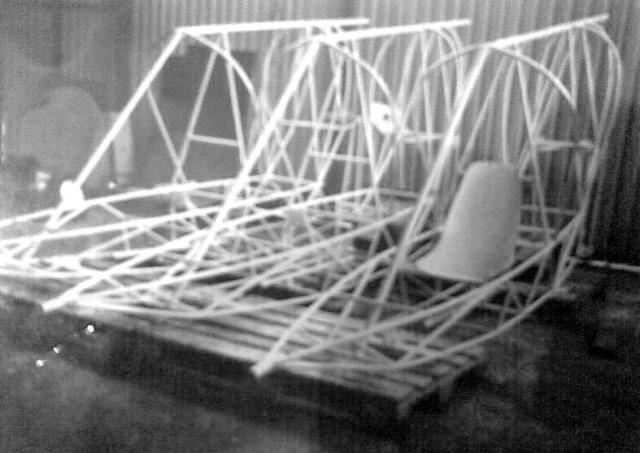
Motolotnie ZEM – szkielety kadłubów
(fot. via Henryk Doruch, źródło: forum homebuildairplanes.com).
Konstrukcja:
Zastosowano zmodyfikowane skrzydło Zeta Z-80 ze sztywnym diagonalnym kesonem z dakronu napiętego na szkielecie z rurek i żeberek. Kil przegubowy. Skrzydło zawieszone przegubowo na węźle kadłubowym. Linki poprzeczne, dolne były prawdopodobnie włączone do układu sterowania motolotnią.
Kadłub o konstrukcji kratownicowej, spawanej z rurek stalowych z owiewkami z laminatu szklano-epoksydowego. Kabina z miejscami tandem, zamykana bocznymi drzwiami.
Podwozie trójkołowe z kółkiem przednim, stałe.
Wyposażenie – podstawowe przyrządy pilotażowe, radiostacja.
Silnik- Rotax 503 2V o mocy 38 kW (52 KM), śmigło pchające, drewniane.
Dane techniczne:
Rozpiętość - 10,2 m, długość - 3,8 m, wysokość - 4,0 m, powierzchnia nośna - 15,0 m2.
Masa własna - 150 kg, masa startowa max - 350 kg.
Prędkość dopuszczalna - 180 km/h, prędkość max - 140 km/h, prędkość przelotowa - 90 km/h, prędkość minimalna - 55 km/h, wznoszenie - 4,0 m/s, opadanie minimalne, z wyłączonym silnikiem - 2,5 m/s, zasięg - 200 km.
Aktywność sportowa, działalność popularyzatorska na rzecz lotniarstwa.
Jerzy Wolf był konstruktorem, ale także pilotem lotniowym i motolotniowym – jednym z pionierów lotniarstwa w Polsce.
Należał także do pierwszego pokolenia instruktorów lotniarstwa w Polsce.
Był przewodniczącym Komisji Lotniarskiej przy Aeroklubie PRL.
W 1978 r. brał udział w Sejmiku Lotniarskim.

Jerzy Wolf siedzi pierwszy od lewej. (źródło: Skrzydlata Polska).
.jpg)
Jerzy Wolf stoi piąty od lewej. (źródło: Skrzydlata Polska).
Jerzy Wolf był kierownikiem polskiej ekipy i uczestnikiem w Lotniowych Mistrzostwach Świata 1979 roku we Francji w St. Hilare, które odbyły się w dniach od 29 lipca do 12 sierpnia.
W 1979 roku jako delegat z Polski brał udział w obradach Komisji Lotniowej Międzynarodowej Federacji Lotniczej FAI we Francji.
Uczestniczył w naukowych konferencjach międzynarodowych dotyczących zagadnień aerodynamiki małych prędkości.
Był autorem licznych artykułów popularyzatorskich dotyczących techniki lotniowej, pilotażu lotni, organizacji sportu lotniowego, które opublikowano m.in. w czasopismach Skrzydlata Polska, Horyzonty Techniki w latach 1977 – 1988.
Dziedzictwo.
Koncepcje Jerzego Wolfa z dziedziny miękkopłatów nie doczekały się co prawda upowszechnienia, ale z pewnością partycypowały w rozwoju lotniarstwa – ich oryginalność i zawarta w rozwiązaniach śmiałość myśli autora powodują, że stanowią konieczny do utrwalenia wkład doktora inżyniera Jerzego Wolfa do historii rozwoju światowej techniki lotniowej.
Warto też uzmysłowić sobie, że istniejące dziś niektóre typy popularnych i użytkowanych z powodzeniem nowoczesnych latających aparatów ultralekkich zostało stworzonych zgodnie z koncepcjami Jerzego Wolfa, które powstały od 25 do 40 lat wcześniej.
Współczesnymi przykładami, że marzenia Jerzego Wolfa urzeczywistniły się w dojrzałej, praktycznej formie są choćby:
– Silent Glider M – wychyłopłat bezogonowy z zamkniętą kabiną.

(źródło Arcor.de)

(źródło Arcor.de)
– Woopy – Fly – skrzydło elastyczne, którego koncepcja w znacznej mierze odpowiada opisowi patentowemu skrzydła sprężystego Wolfa z 1973 roku.

(źródło Delta Club 82)
Warto też zwrócić uwagę, że dzisiejsze lotnie w znacznym stopniu odpowiadają opisowi lotni przyszłości dokonanemu przez Jerzego Wolfa w 1988 roku, a więc 26 lat temu:
„(…) Cechą lotni przyszłości będzie wyraźnie zwiększona do około 15 doskonałość, zmniejszone do około 0,6 m/s opadanie. Osiągnięte to będzie przez dalsze zwiększenie – powyżej 12m – rozpiętości skrzydła przy zachowaniu łatwości jego składania. Zmniejszona będzie energochłonność sterowania z zachowaniem czasu przechylenia lotni o 90º nie większym niż 3s. Lotnia o takich właściwościach umożliwi wielogodzinne latanie przy zachowaniu niezbędnego komfortu pilotażu. Ponieważ lotnia wraz z pilotem stanowi aerodynamiczną całość, dlatego dużego znaczenia nabiera dobre oprofilowanie pilota. Równie duże znaczenie ma redukcja oporów linek szkieletu, szczególnie górnych linek, tzw. antyflatterowych, ustateczniających lotnię w locie szybkim. Linki te wraz z rurową podpórką końca skrzydła zastąpione powinny być innym lepszym aerodynamicznie sposobem zapobiegania skręceniu skrzydła. Inną, ważną cechą lotni przyszłości będzie duży zakres prędkości, zwłaszcza prędkość maksymalna. Podatne skrętnie skrzydło lotniowe pozwoli na prędkości ok. 200 km/h. Umożliwia je specyficzna struktura skrzydła lotniowego, mało podatna na klasyczny flatter i dywergencję aeroelastyczną, w której wymuszona oś skręceń przebiega wzdłuż rury krawędzi natarcia jako osi obrotu profili skrzydła. Problem trzepotania elastycznego spływu skrzydła jest łatwy do rozwiązania przez zagęszczenie użebrowania i właściwe napięcie i ukształtowanie spływu. Uzyskanie małej prędkości i dobrego przeciągnięcia będzie możliwe z kolei dzięki bardzo miękkim i podatnym skrętnie zakończeniom skrzydła pozwalającym na stateczny i i sterowny lot w warunkach głębokiego przeciągnięcia. Temu celowi będzie też służyła mała masa i obciążenie jednostkowe skrzydła. Oczywiście przy dużej jego rozpiętości oznacza to konieczność stosowania nowych tworzyw i metali, tkanin i kompozytów, które stanowią przyszłą technologiczną barierę rozwoju techniki lotniowej. (…)”.

Lotnia współczesna T2C, prod. Wills Wing (źródło: Christian Cid)
Podziękowania dla Zbigniewa Czerwika, inspiratora powyższego opracowania, za udzielone konsultacje, oraz dla Dariusza Parzyszka za korektę.
Artur Caban
Przeczytaj również:
Miękkopłaty Jerzego Wolfa - część I
Bibliografia, źródła informacji:
- Opis patentowy nr 71138 - Skrzydło o napiętej obwodowo sprężystej powłoce, 1970r.
- Opis patentowy nr 75433 - Skrzydło sprężyste, 1973r.
- Jerzy Wolf, Technological prospects for oscillating – wing propulsion of ultralight gliders, 1974r.
- Jerzy Wolf, Improvement of hang glider performance by use of ultralight elastic wing, 1979r.
- Jerzy Wolf, Tadeusz Idziak, Wojciech Narożniak, Zakończenie skrzydła lotni. Instytut Lotnictwa, Warszawa, Biuletyn Urzędu Patentowego z 1985r.
- Jerzy Wolf, A metod for determining the lift-to-drag ratio of a propeller hang-glider, Aeronautical Journal, February 1996.
- Zbigniew Czerwik ”Historia Lotniarstwa w Aerokubie Łódzkim”, lotniczapolska.pl, 2006 r.
- J. Grzegorzewski, T. Królikiewicz "80 lat Instytutu Lotnictwa", Biblioteka Naukowa Instytutu Lotnictwa, Warszawa 2006r.
- samolotypolskie.pl
- lotnie.pl
- homebuildairplanes.com
- Skrzydlata Polska, roczniki 1977 – 1988.
- Przegląd Lotniczy PLAR 10/2004.
- Horyzonty Techniki, rocznik 1988.
- Rozdział dotyczący żagli poziomych opracowano na podstawie: Krzysztof Mnich „Pod parasolem" - http://www.zeglarstwo.sail-ho.pl/proa/memuary/nietopiso.htm
- Komunikat nr 78 Prezesa ULC z dnia 24 października 2007r. w sprawie zdarzenia lotniczego Nr 176/04.
- T. Makowski „Współczesne konstrukcje lotnicze Polski”, Agencja Lotnicza Altair, Warszawa 1996r.
- Relacje ustne: dr inż. Zbigniew Czerwik
")

")


")






Komentarze